光伏控制系統(tǒng)案例分析

太陽能路燈目前是光伏發(fā)電應(yīng)用最為廣泛的領(lǐng)域之一。太陽能路燈以太陽光為能源,在安裝和使用過程中不需要鋪設(shè)復(fù)雜的管線,安全節(jié)能無污染。白天利用太陽光給路燈中的蓄電池充電,晚上利用蓄電池儲存的電能供給路燈工作。
路燈的開、關(guān)過程采用光控,在太陽能路燈的控制系統(tǒng)中采用最大功率跟蹤技術(shù),最大程度地吸收太陽能,提高太陽能電池陣列的轉(zhuǎn)換效率,同時(shí)可以降低路燈系統(tǒng)運(yùn)行成本。
下面案例中,針對太陽能控制系統(tǒng)的特點(diǎn)設(shè)計(jì)了一種基于PIC16F877單片機(jī)的智能控制器,提出了可行的太陽能電池最大功率點(diǎn)跟蹤方法和合理的蓄電池充電放電策略,該系統(tǒng)控制器具有電路結(jié)構(gòu)簡單、可靠性高、實(shí)用性強(qiáng)等優(yōu)點(diǎn)。

1.太陽能路燈控制系統(tǒng)
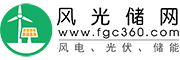
太陽能路燈控制系統(tǒng)的結(jié)構(gòu)框圖如圖1-1所示,照明負(fù)載LED光源,光伏組件為單晶硅太陽能電池板,蓄電池為閥控式密封鉛酸蓄電池,虛線框所示即為所提出的控制器的主要部分。
整個(gè)系統(tǒng)用Microchip的PIC16877單片機(jī)實(shí)現(xiàn)控制,并利用單片機(jī)輸出的PWM波控制Buck型降壓電路來改變太陽能電池陣列的等效負(fù)載,實(shí)現(xiàn)太陽能電池的最大功率跟蹤。
VD1為太陽能電池板的防反、反充二極管,采用快恢復(fù)二極管,C1、C2為濾波電容,V為場效應(yīng)開關(guān)管,L為儲能電感,VD2為續(xù)流二極管。
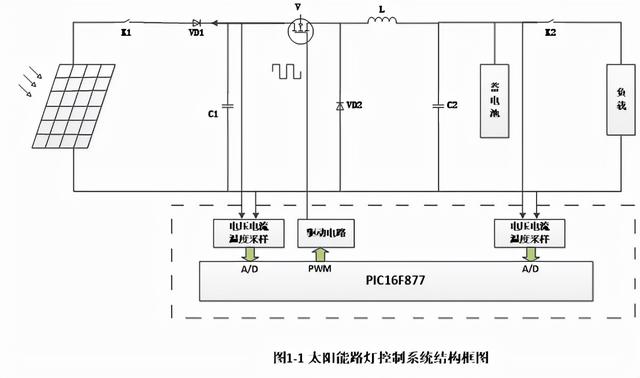
圖1-1 太陽能路燈控制系統(tǒng)結(jié)構(gòu)框圖
2.控制器硬件設(shè)計(jì)
控制器是太陽能路燈控制系統(tǒng)的核心部分,關(guān)系到整個(gè)光伏系統(tǒng)的正常運(yùn)行及工作效率。本案例中的智能控制器結(jié)構(gòu)框圖如圖1-2所示??刂破鞯暮诵氖荘IC16F877,它是目前世界上片內(nèi)集成外圍模塊最多、功能最強(qiáng)的單片機(jī)品種之一,是一種高性能的8位單片機(jī)。
PIC16F877采用哈佛總線結(jié)構(gòu)和RISC技術(shù),指令執(zhí)行效率高,功耗極低,帶有FLASH程序儲存器,同時(shí)配置有5個(gè)端口33個(gè)雙向輸入輸出引腳,內(nèi)嵌8個(gè)10位數(shù)字量精度的A/D轉(zhuǎn)換器,配有兩個(gè)可實(shí)現(xiàn)脈沖調(diào)制波形輸出的CCP模塊。
控制器的主要工作是白天實(shí)現(xiàn)太陽能電池板對蓄電池充電的控制,晚上實(shí)現(xiàn)蓄電池對負(fù)載放電的控制,具有光控功能,能夠在白天夜間自動切換。
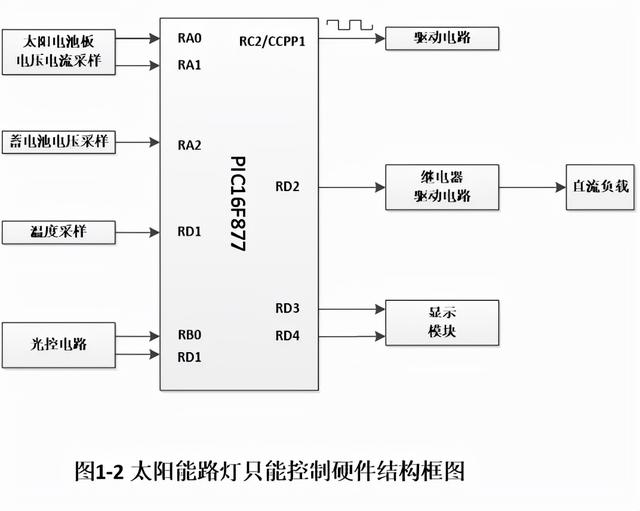
圖1-2 太陽能路燈智能控制硬件結(jié)構(gòu)框圖
控制器采集太陽能電池輸出的電壓電流,以實(shí)現(xiàn)太陽能電池最大功率點(diǎn)MPPT的跟蹤;采集蓄電池的端電壓,防止蓄電池的過充及過放;采集溫度,用于實(shí)現(xiàn)溫度補(bǔ)償。電壓采集可用霍爾傳感器或電阻分壓法實(shí)現(xiàn),電流采集可用霍爾感器或分流器實(shí)現(xiàn)。
顯示模塊提示蓄電池過充、蓄電池欠壓等顯示功能,采用兩個(gè)雙色LED發(fā)光二極管(LED1,LED2)實(shí)現(xiàn),分別顯示充電和放電狀態(tài)。當(dāng)電壓由低到高變化時(shí),指示燈由紅色到橙色到綠色漸變顏色顯示電壓高低。
充電狀態(tài):當(dāng)蓄電池電壓低于13伏時(shí),LED1顯示綠色;當(dāng)蓄電池電壓在13.4~14.4伏之間,時(shí)LED1顯示橙色;當(dāng)蓄電池電壓高于14.4伏時(shí),LED1顯示紅色。
放電狀態(tài):當(dāng)蓄電池電壓低于11伏時(shí),LED2顯示紅色;當(dāng)蓄電池電池電壓在12.2~12.4伏之間時(shí)LED2顯示橙色;當(dāng)蓄電池電壓高于12.4伏時(shí),LED2顯示綠色。

3.蓄電池充放電策略
作為太陽能路燈照明系統(tǒng),儲能用的蓄電池由于存在過放、過充、使用壽命短等問題,要選擇合適的充放電策略。所有的蓄電池充電過程都有快充、過充和浮充三個(gè)階段,每一個(gè)階段都有不同的充電要求。系統(tǒng)中的控制器,采取綜合使用各充電方法應(yīng)用于三個(gè)階段充電。
快充階段:蓄電池能夠接受最大功率時(shí),采取太陽能電池最大功率點(diǎn)跟蹤,對蓄電池進(jìn)行充電。當(dāng)蓄電池端電壓達(dá)到轉(zhuǎn)換門限值后,進(jìn)入過充階段。
過充階段:采用恒壓充電法,給蓄電池一個(gè)較高的恒定電壓,同時(shí)檢測充電電流,當(dāng)充電電流降到低于轉(zhuǎn)換門限值時(shí),認(rèn)為蓄電池電量已充滿,充電電路轉(zhuǎn)換到浮充階段。
浮充階段:蓄電池一旦接近全充滿時(shí),其內(nèi)部的大部分活性物質(zhì)已經(jīng)恢復(fù)成原來的狀態(tài),這時(shí)候?yàn)榉乐惯^充,采用比正常充電更低的充電電壓進(jìn)行充電。浮充電壓根據(jù)蓄電池的實(shí)際要求設(shè)定,對12伏的閥控式密封鉛酸蓄電池來說,一般在13.4~14.4伏之間,此時(shí)在溫差較大的地區(qū),還應(yīng)該進(jìn)行適當(dāng)?shù)臏囟妊a(bǔ)償。

4.最大功率點(diǎn)跟蹤控制策略
在室外環(huán)境中,太陽能電池的輸出電壓和輸出電流隨著日照強(qiáng)度和電池結(jié)溫的變化,具有強(qiáng)烈的非線性。因此控制器采用干擾觀測法來實(shí)現(xiàn)MPPT控制。在電路的具體實(shí)現(xiàn)中,干擾觀測法通過DC-DC變換器中的Buck型降壓電路來實(shí)現(xiàn)。
將Buck型降壓電路應(yīng)用于太陽能路燈控制系統(tǒng)后,V為IR540NMOS場效應(yīng)管,開關(guān)管的驅(qū)動采用TLP250,單片機(jī)輸出一個(gè)頻率10KHz的PWM波來控制開關(guān)器件。由此,通過調(diào)節(jié)負(fù)載兩端的電壓來改變太陽電池陣列的等效負(fù)載,從而實(shí)現(xiàn)太陽能電池的最大功率點(diǎn)跟蹤。

5.控制系統(tǒng)軟件設(shè)計(jì)
控制器軟件的主要任務(wù)是:實(shí)現(xiàn)蓄電池的充電控制;完成電壓電流的采集處理和計(jì)算;實(shí)現(xiàn)MPPT控制算法;實(shí)現(xiàn)蓄電池對負(fù)載的放電控制??刂葡到y(tǒng)軟件采用模塊化程序設(shè)計(jì)方法,其主程序流程圖,如圖1-3所示。
圖1-3 控制系統(tǒng)主程序流程圖
這里所設(shè)計(jì)的以單片機(jī)PIC16F877為控制核心的智能太陽能路燈控制器,具有外圍電路簡單、可靠性高的特點(diǎn),實(shí)現(xiàn)了太陽能電池的最大功率點(diǎn)跟蹤,采用了合理的蓄電池充放電策略,算法簡單,既提高了太陽能電池板的使用效率,同時(shí)又延長了蓄電池的使用壽命。


!盛虹動能2025 SNEC PV+展會嗨翻全")
股份園區(qū)光伏發(fā)電項(xiàng)目圓滿竣工")
光儲網(wǎng)客服")